Get a quote in only 3 steps!
1. Add the items you are interested in to your cart
2.Go to your cart
3.Click on GENERATE A QUOTE
Your quotations are available online on your customer account.
The Franka Research 3 (FR3) Robotic Arm has torque sensors in all its 7 axes for superior compliance, making it possible to stop the FR3 arm with merely a balloon.
These sensors also make it exceptionally accurate and stable.
The FR3 robot gripper (see Accessories) is capable of exerting a continuous gasping force of 70 N (and a maximum force of 140 N) and can lift up to 3 kg. The maximum width of the open gripper is 80 mm. Which allows this FRANKA EMIKA robotic arm to lift a wide variety of objects.
The team of engineers responsible for designing this robot wanted to create a dexterity and compliance as similar as possible to those of a human arm.
Franka Emika is a company based in Munich founded by the distinguished Professor Sami Haddadin, who is now head of the Department of Robotics and AI at the Technical University of Munich (TUM).
He has held research positions at the German Aerospace Center (DLR) and is the author of over 130 scientific publications. He has also received numerous awards and prizes for his work in the field of robotics and AI.
Users of the FR3 Robotic Arm, developed and produced in Germany by Franka Emika, will enjoy its German precision and cutting-edge technology.
Particularly simple to install and operate, you can get your FR3 robot up and running in just 15 minutes.
The robot’s Desk interface can be accessed from just a web browser. Simply connect to the robot using an Ethernet cable to establish communication and you can begin controlling the FR3 arm. Its Desk interface is very intuitive and easy to use.
Desk interface for the Franka Emika FR3 robot
The FR3 Robotic Arm is designed to be both versatile and quick to master, so it can be easily used in a variety of very different environments, including:
The FR3 Robotic Arm is precise, supports C++ and ROS integration, is easy to use and is affordable, making it a popular choice for universities and research laboratories.
The Inria Rennes research centre chose the FRANKA EMIKA robot arm for its ViSP project, as part of a visual servoing SDK. They adapted a RealSense camera to a FRANKA EMIKA arm, which then used its gripper to follow a QR code printed on a sheet of paper moved around by a researcher at random.
You will find more information about ViSP along with the tutorial with the FRANKA EMIKA arm at the Inria ViSP website.
Students from the Imperial College London university have also carried out a project using the FRANKA EMIKA robot for their Technical Robotics Design module.
You will find all the documentation for this project, aimed at teaching the FRANKA EMIKA robot how to play chess, online here: DE3-ROB1 CHESS Group Documentation.
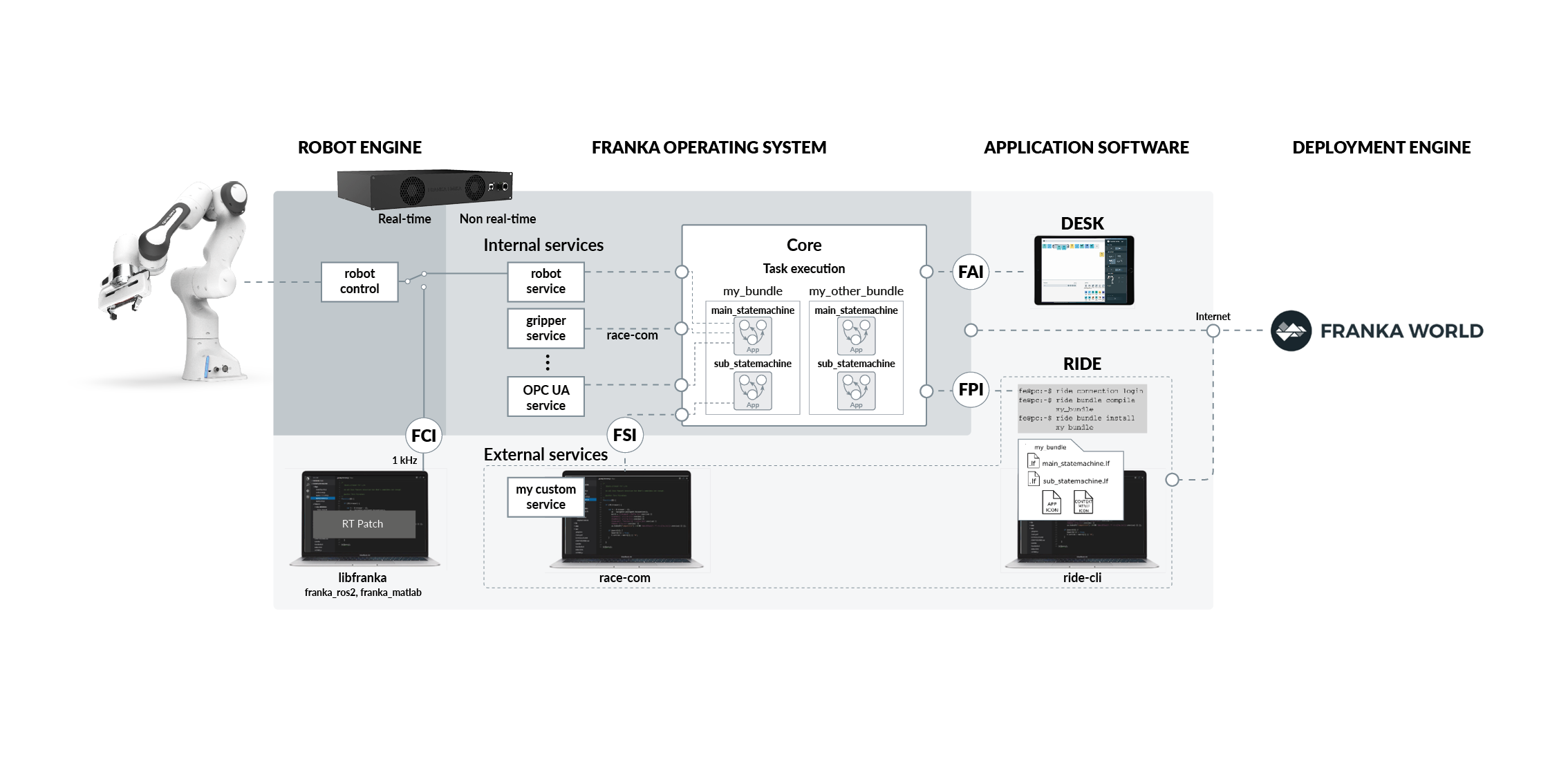
Desk is the high-level interface of Franka Emika. It offers an easy-to-use option to create complete tasks in no time. Desk is the most suitable interface for rapid prototyping, simple human robot interaction studies and demos. No prior knowledge of programming is necessary.
It enables researchers to fully integrate the Franka Emika system into experimental setups, and exploit its integrated high performance controllers. It is also a great tool for teaching introductory robotics. RIDE is your tool for writing custom Desk Apps and connecting external sensors and any other functionality to the system.
FCI is an acronym that stands for Franka Control Interface, a solution developed by Franka Emika that lets you control and program the Franka Research 3 robot in C++. The FCI also allows the integration of ROS and MoveIt!
FCI bypasses the robot’s Control to let researchers run their own control algorithms in external real-time capable PCs at 1 kHz. It is the ideal interface to explore low-level planning and control schemes.
Franka Research 3 Robotics robot arms can be set up on top of a Boxer mobile robot, with a ROS integration.

The Robot Arm Franka Research 3 comes with: